DiscoFish touted its driverless capabilities and the hope was for TechnoGecko to follow in its footprints, to also be fully autonomous on playa. But, this creature is lot more complicated. The first year of TechnoGecko on playa we used a remote to drive it around playa. Being able to drive it from the ground and not need a driver seat was a cool first step, but we wanted a hands-off experience with cutting edge technology. We wanted more.

Developing way-point technology for one vehicle is tricky enough considering all the obstacles at Block Rock City: acidity, uneven surface, lack of roads or markers or any kind, dust storms, pitch darkness, tons of bikers and walkers, and destinations with obstacles of all sorts between. But, to develop it for multiple modules that can split apart, come back together, move around things, all synchronized and at the same time safety maneuvering all that the playa will throw at it is a tall order.
Luckily, Neils joined our team and is an expert with the technology. He hopes to set an example on playa for what those LIDAR best practices are.

This year he is developing out the back end which will be necessary to operate all the vehicle modules simultaneously as we continue to complete and add more over the next few years. Since we have two modeules this year on the TechnoGecko there will be a basic way-point technology between the creature and its destination but the code will be there if more sophistication is applicable.
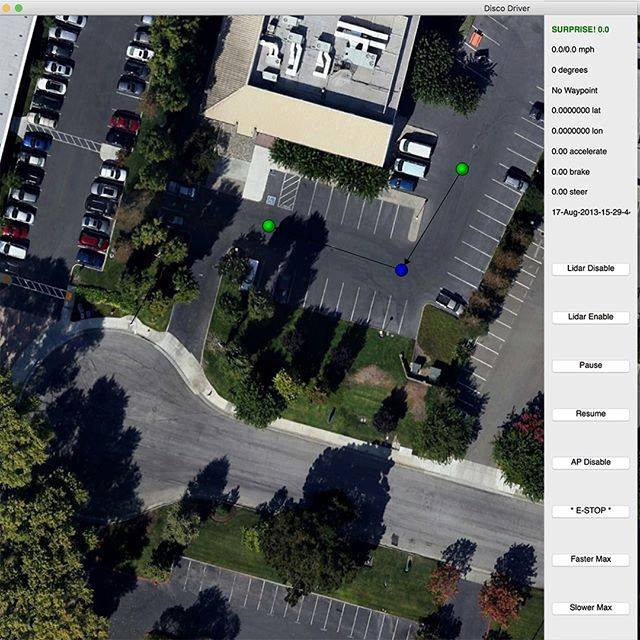
Neils jumped right in, got the LIDAR basics setup and the interface for setting destinations and targets ready to go. Over the next few weeks he will continue to test, build, code, and generate everything to get the TechnoGecko autonomous on playa in Black Rock City.